

Interface Arduino with 7-segment display | 4-Digit counter example
This post shows how to interface Arduino UNO board with 7-segment display in order to build a simple 4-digit counter which counts from 0 to 9999. A push button connected to Arduino is used to increment the displayed number.
There are two types of the seven-segment displays: common anode and common cathode.
In the common anode type all the 7 LED anode terminals are connected together whereas in the common cathode all cathode terminals are connected together.
The common terminal is connected to +VCC (+5V, +3.3V …) or GND (0V) depending on the type of the 7-segment display (common anode or common cathode respectively).
Basically for each 7-segment digit there are 8 pins: one for the common terminal (anode or cathode) and 7 pins for the 7 segments (A, B, C, D, E, F and G). Another pin may be used for the decimal point (DP).
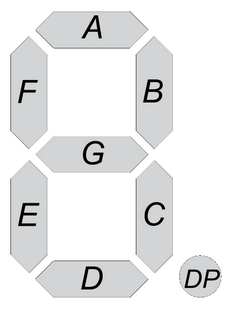 In multi-digit 7-segment display (for example 4-digit) all pins of the same segment are connected together (segment A of digit 1 with segment A of digit 2 …), and each digit has its common pin alone. This is called multiplexing technique. This technique minimizes number of pins used.
So for a 4-digit display we’ll have 7 pins of the 7 segments, 4 pins of the 4 digits (common terminals) and 1 pin for the decimal point (DP) which means a total of 12 pins.
Hardware Required:
In multi-digit 7-segment display (for example 4-digit) all pins of the same segment are connected together (segment A of digit 1 with segment A of digit 2 …), and each digit has its common pin alone. This is called multiplexing technique. This technique minimizes number of pins used.
So for a 4-digit display we’ll have 7 pins of the 7 segments, 4 pins of the 4 digits (common terminals) and 1 pin for the decimal point (DP) which means a total of 12 pins.
Hardware Required:
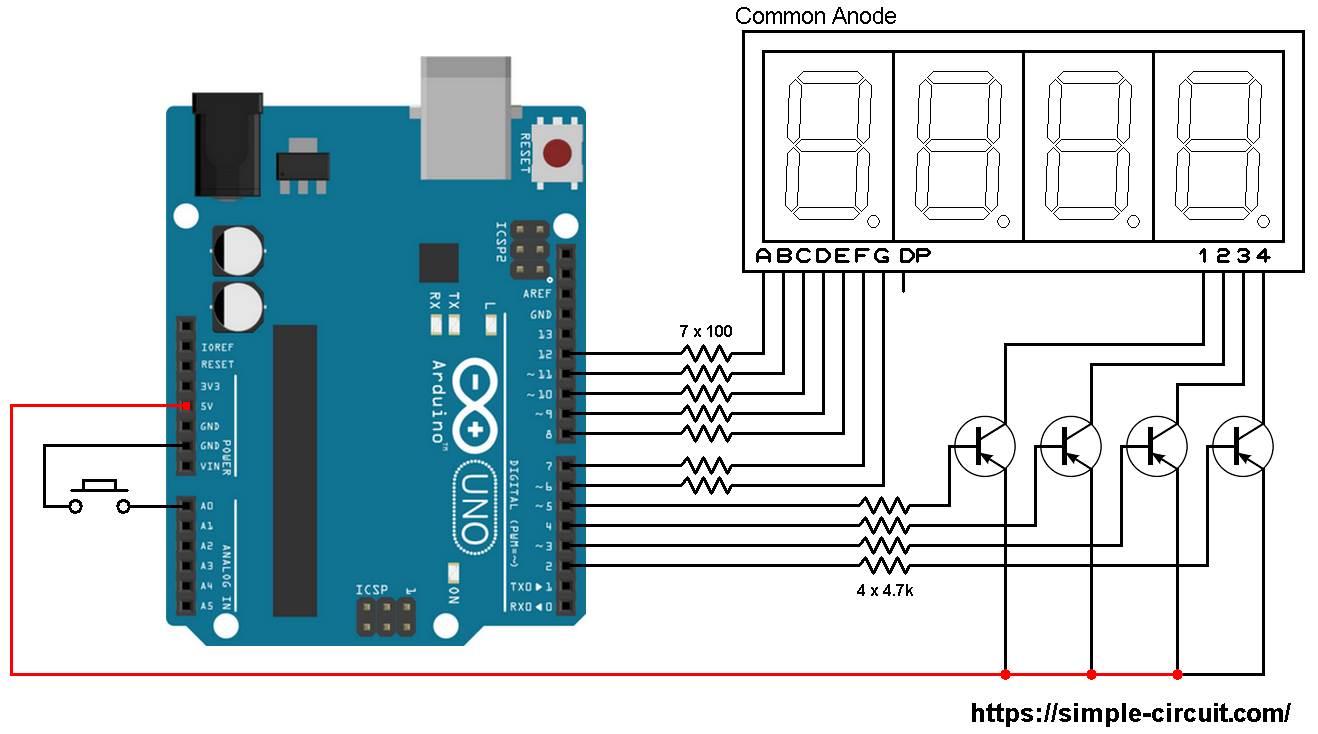
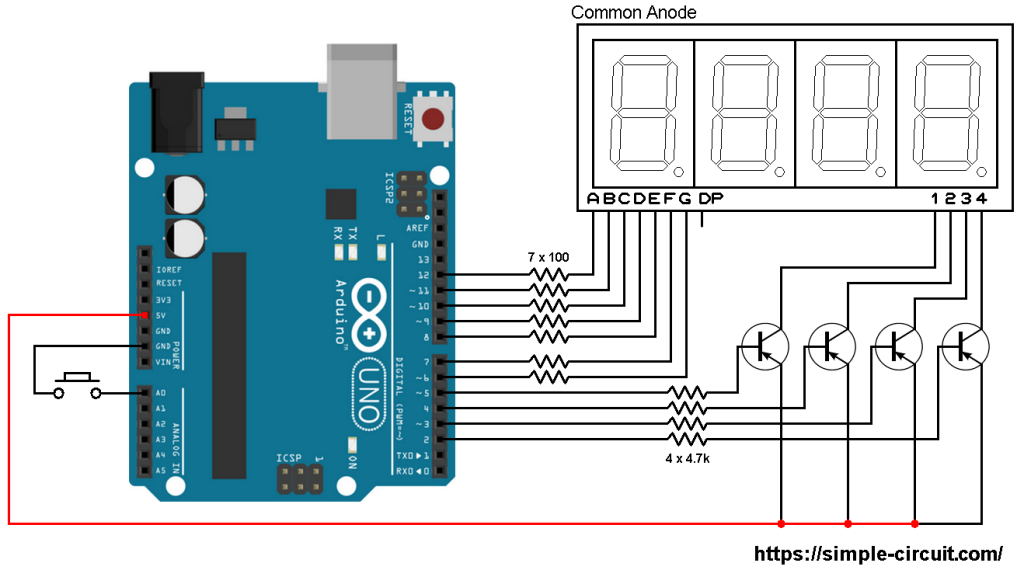 The push button which is connected to Arduino A0 pin is used to increment the displayed number.
A common anode 7-segment display is used in this example.
In the circuit there are 4 transistors of the type PNP, the collector of each transistor is connected to common anode pin of 1 digit. That means each transistor supplies one digit segments.
The 4 transistors are used to supply the display LEDs with sufficient current because Arduino microcontroller (ATmega328P) may not be able to do that (maximum output current is 40mA).
Each transistor emitter pin is connected to +5V that comes from the Arduino board and each transistor base is connected to the Arduino through 4.7k resistor.
Each 100 ohm resistor is used for limiting the current that passes through the segment LED.
Interfacing Arduino with 7-segment display code:
Example Arduino code is below.
Since the 4 digits are multiplexed we need to refresh the display very quickly (display one digit at a time, others are off). For that I used Timer1 module interrupt with the following configuration:
The push button which is connected to Arduino A0 pin is used to increment the displayed number.
A common anode 7-segment display is used in this example.
In the circuit there are 4 transistors of the type PNP, the collector of each transistor is connected to common anode pin of 1 digit. That means each transistor supplies one digit segments.
The 4 transistors are used to supply the display LEDs with sufficient current because Arduino microcontroller (ATmega328P) may not be able to do that (maximum output current is 40mA).
Each transistor emitter pin is connected to +5V that comes from the Arduino board and each transistor base is connected to the Arduino through 4.7k resistor.
Each 100 ohm resistor is used for limiting the current that passes through the segment LED.
Interfacing Arduino with 7-segment display code:
Example Arduino code is below.
Since the 4 digits are multiplexed we need to refresh the display very quickly (display one digit at a time, others are off). For that I used Timer1 module interrupt with the following configuration:
With the above configuration Timer1 module overflows every 4096 microseconds (4096 = 65536/16) which is a good refresh period.
Note that Timer1 module is 16-bit timer, prescaler = 1 (TCCR1B = 1) and Arduino UNO clock = 16MHz.
The following video shows a simple protoboard circuit of the example:
and the video below shows Proteus simulation (simulation circuit is not the same as real hardware circuit, example circuit diagram is shown above):
Proteus simulation file download:
Arduino 7-segment display counter
Other Arduino projects where 7-segment display was used:
Print Arduino ADC values on 7-segment display
Arduino with rotary encoder and 7 segment display
Arduino with LM335 temperature sensor and seven-segment display
Interfacing Arduino with LM35 sensor and 7-segment display
7-Segment display with 74HC595 shift register | Arduino Projects
In multi-digit 7-segment display (for example 4-digit) all pins of the same segment are connected together (segment A of digit 1 with segment A of digit 2 …), and each digit has its common pin alone. This is called multiplexing technique. This technique minimizes number of pins used.
So for a 4-digit display we’ll have 7 pins of the 7 segments, 4 pins of the 4 digits (common terminals) and 1 pin for the decimal point (DP) which means a total of 12 pins.
Hardware Required:
- Arduino UNO board
- 4-Digit common anode 7-segment display
- 4 x PNP transistor (2SA1015, 2S9015, 2N3906 …)
- 7 x 100 ohm resistor
- 4 x 4.7k ohm resistor
- Push button
- Breadboard
- Jumper wires
 The push button which is connected to Arduino A0 pin is used to increment the displayed number.
A common anode 7-segment display is used in this example.
In the circuit there are 4 transistors of the type PNP, the collector of each transistor is connected to common anode pin of 1 digit. That means each transistor supplies one digit segments.
The 4 transistors are used to supply the display LEDs with sufficient current because Arduino microcontroller (ATmega328P) may not be able to do that (maximum output current is 40mA).
Each transistor emitter pin is connected to +5V that comes from the Arduino board and each transistor base is connected to the Arduino through 4.7k resistor.
Each 100 ohm resistor is used for limiting the current that passes through the segment LED.
Interfacing Arduino with 7-segment display code:
Example Arduino code is below.
Since the 4 digits are multiplexed we need to refresh the display very quickly (display one digit at a time, others are off). For that I used Timer1 module interrupt with the following configuration:
The push button which is connected to Arduino A0 pin is used to increment the displayed number.
A common anode 7-segment display is used in this example.
In the circuit there are 4 transistors of the type PNP, the collector of each transistor is connected to common anode pin of 1 digit. That means each transistor supplies one digit segments.
The 4 transistors are used to supply the display LEDs with sufficient current because Arduino microcontroller (ATmega328P) may not be able to do that (maximum output current is 40mA).
Each transistor emitter pin is connected to +5V that comes from the Arduino board and each transistor base is connected to the Arduino through 4.7k resistor.
Each 100 ohm resistor is used for limiting the current that passes through the segment LED.
Interfacing Arduino with 7-segment display code:
Example Arduino code is below.
Since the 4 digits are multiplexed we need to refresh the display very quickly (display one digit at a time, others are off). For that I used Timer1 module interrupt with the following configuration:
|
1
2
3
4
5
|
// Timer1 module overflow interrupt configuration
TCCR1A = 0;
TCCR1B = 1; // enable Timer1 with prescaler = 1 ( 16 ticks each 1 µs)
TCNT1 = 0; // set Timer1 preload value to 0 (reset)
TIMSK1 = 1; // enable Timer1 overflow interrupt
|
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
|
/*
* Interfacing Arduino with common anode 7-segment display
* 4-Digit counter example.
* This is a free software with NO WARRANTY.
* http://simple-circuit.com/
*/
// counter button definition
#define button A0
// segment pin definitions
#define SegA 12
#define SegB 11
#define SegC 10
#define SegD 9
#define SegE 8
#define SegF 7
#define SegG 6
// common pins of the four digits definitions
#define Dig1 5
#define Dig2 4
#define Dig3 3
#define Dig4 2
// variable declarations
byte current_digit;
int count = 0;
void setup()
{
pinMode(button, INPUT_PULLUP);
pinMode(SegA, OUTPUT);
pinMode(SegB, OUTPUT);
pinMode(SegC, OUTPUT);
pinMode(SegD, OUTPUT);
pinMode(SegE, OUTPUT);
pinMode(SegF, OUTPUT);
pinMode(SegG, OUTPUT);
pinMode(Dig1, OUTPUT);
pinMode(Dig2, OUTPUT);
pinMode(Dig3, OUTPUT);
pinMode(Dig4, OUTPUT);
disp_off(); // turn off the display
// Timer1 module overflow interrupt configuration
TCCR1A = 0;
TCCR1B = 1; // enable Timer1 with prescaler = 1 ( 16 ticks each 1 µs)
TCNT1 = 0; // set Timer1 preload value to 0 (reset)
TIMSK1 = 1; // enable Timer1 overflow interrupt
}
ISR(TIMER1_OVF_vect) // Timer1 interrupt service routine (ISR)
{
disp_off(); // turn off the display
switch (current_digit)
{
case 1:
disp(count / 1000); // prepare to display digit 1 (most left)
digitalWrite(Dig1, LOW); // turn on digit 1
break;
case 2:
disp( (count / 100) % 10); // prepare to display digit 2
digitalWrite(Dig2, LOW); // turn on digit 2
break;
case 3:
disp( (count / 10) % 10); // prepare to display digit 3
digitalWrite(Dig3, LOW); // turn on digit 3
break;
case 4:
disp(count % 10); // prepare to display digit 4 (most right)
digitalWrite(Dig4, LOW); // turn on digit 4
}
current_digit = (current_digit % 4) + 1;
}
// main loop
void loop()
{
if(digitalRead(button) == 0)
{
count++; // increment 'count' by 1
if(count >: 9999)
count = 0;
delay(200); // wait 200 milliseconds
}
}
void disp(byte number)
{
switch (number)
{
case 0: // print 0
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, LOW);
digitalWrite(SegF, LOW);
digitalWrite(SegG, HIGH);
break;
case 1: // print 1
digitalWrite(SegA, HIGH);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, HIGH);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, HIGH);
digitalWrite(SegG, HIGH);
break;
case 2: // print 2
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, HIGH);
digitalWrite(SegD, LOW);
digitalWrite(SegE, LOW);
digitalWrite(SegF, HIGH);
digitalWrite(SegG, LOW);
break;
case 3: // print 3
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, HIGH);
digitalWrite(SegG, LOW);
break;
case 4: // print 4
digitalWrite(SegA, HIGH);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, HIGH);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, LOW);
digitalWrite(SegG, LOW);
break;
case 5: // print 5
digitalWrite(SegA, LOW);
digitalWrite(SegB, HIGH);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, LOW);
digitalWrite(SegG, LOW);
break;
case 6: // print 6
digitalWrite(SegA, LOW);
digitalWrite(SegB, HIGH);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, LOW);
digitalWrite(SegF, LOW);
digitalWrite(SegG, LOW);
break;
case 7: // print 7
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, HIGH);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, HIGH);
digitalWrite(SegG, HIGH);
break;
case 8: // print 8
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, LOW);
digitalWrite(SegF, LOW);
digitalWrite(SegG, LOW);
break;
case 9: // print 9
digitalWrite(SegA, LOW);
digitalWrite(SegB, LOW);
digitalWrite(SegC, LOW);
digitalWrite(SegD, LOW);
digitalWrite(SegE, HIGH);
digitalWrite(SegF, LOW);
digitalWrite(SegG, LOW);
}
}
void disp_off()
{
digitalWrite(Dig1, HIGH);
digitalWrite(Dig2, HIGH);
digitalWrite(Dig3, HIGH);
digitalWrite(Dig4, HIGH);
}
// end of code.
|
